電子海圖開(kāi)發(fā)第四十九篇 船舶綜合導(dǎo)航系統(tǒng)的設(shè)計(jì)
在《電子海圖開(kāi)發(fā)》系列文章接近中期之際,我們迎來(lái)一個(gè)關(guān)鍵節(jié)點(diǎn):船舶綜合導(dǎo)航系統(tǒng)(Integrated Navigation System, INS)的設(shè)計(jì)。作為現(xiàn)代航海技術(shù)的核心,INS不僅是電子海圖顯示與信息系統(tǒng)(ECDIS)的延伸,更是船舶智能化、自動(dòng)化的基石。本文將深入探討其設(shè)計(jì)理念、架構(gòu)組成與實(shí)現(xiàn)路徑,為后續(xù)百篇系列中更深入的軟硬件技術(shù)開(kāi)發(fā)奠定基礎(chǔ)。
一、設(shè)計(jì)理念與核心目標(biāo)
船舶綜合導(dǎo)航系統(tǒng)的核心設(shè)計(jì)理念在于 “集成、融合、決策支持” 。它旨在打破傳統(tǒng)導(dǎo)航設(shè)備(如雷達(dá)、GPS、AIS、陀螺羅經(jīng)、測(cè)深儀、計(jì)程儀等)的信息孤島,通過(guò)數(shù)據(jù)融合與智能處理,為駕駛員提供一個(gè)統(tǒng)一、精確、可靠的態(tài)勢(shì)感知與決策支持平臺(tái)。其核心目標(biāo)包括:
- 增強(qiáng)安全性:通過(guò)多源信息冗余與一致性校驗(yàn),降低單一傳感器故障風(fēng)險(xiǎn),并提供碰撞、擱淺等風(fēng)險(xiǎn)的早期預(yù)警。
- 提升航行效率:優(yōu)化航線(xiàn)規(guī)劃與航速控制,輔助實(shí)現(xiàn)經(jīng)濟(jì)航行。
- 減輕船員負(fù)擔(dān):自動(dòng)化信息處理與告警,簡(jiǎn)化操作流程,使駕駛員能更專(zhuān)注于戰(zhàn)略決策。
- 支持自主航行:為未來(lái)更高程度的船舶自動(dòng)化提供數(shù)據(jù)與決策基礎(chǔ)。
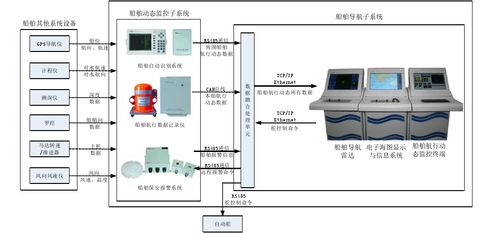
二、系統(tǒng)架構(gòu)設(shè)計(jì)
一個(gè)典型的INS采用分層、模塊化的系統(tǒng)架構(gòu),通常包含以下層次:
- 數(shù)據(jù)采集層:
- 硬件接口:負(fù)責(zé)與各類(lèi)導(dǎo)航傳感器(NMEA 0183/NMEA 2000協(xié)議)、雷達(dá)/ARPA、AIS、船載控制系統(tǒng)等建立物理與協(xié)議連接。
- 數(shù)據(jù)解析與標(biāo)準(zhǔn)化:將不同格式、頻率的原始數(shù)據(jù)解析并轉(zhuǎn)換為系統(tǒng)內(nèi)部統(tǒng)一的標(biāo)準(zhǔn)化數(shù)據(jù)模型,這是數(shù)據(jù)融合的前提。
- 數(shù)據(jù)處理與融合層(核心):
- 數(shù)據(jù)融合算法:應(yīng)用卡爾曼濾波、多模型估計(jì)等算法,對(duì)位置、航向、航速等關(guān)鍵導(dǎo)航參數(shù)進(jìn)行多源融合,生成最優(yōu)估計(jì)值(如“綜合船位”)。
- 態(tài)勢(shì)評(píng)估:綜合本船動(dòng)態(tài)、目標(biāo)船動(dòng)態(tài)、海圖信息、水文氣象數(shù)據(jù),實(shí)時(shí)構(gòu)建并更新航行環(huán)境態(tài)勢(shì)圖。
- 信息管理:處理航路點(diǎn)、航線(xiàn)、警報(bào)、航行日志等信息的存儲(chǔ)與調(diào)用。
- 應(yīng)用與顯示層:
- 綜合信息顯示:在電子海圖背景上,疊加融合后的本船位置、所有目標(biāo)矢量、安全等深線(xiàn)、警戒區(qū)、預(yù)警信息等,形成“單一窗口”式的綜合導(dǎo)航視圖。
- 智能決策支持:提供航線(xiàn)自動(dòng)校驗(yàn)、航路規(guī)劃、避碰輔助(CPA/TCPA計(jì)算與報(bào)警)、航跡保持等功能模塊。
- 人機(jī)交互界面(HMI):設(shè)計(jì)符合人體工程學(xué)、IMO性能標(biāo)準(zhǔn)要求的操作界面,確保信息呈現(xiàn)直觀、操作便捷可靠。
- 系統(tǒng)服務(wù)與輸出層:
- 數(shù)據(jù)記錄與回放:滿(mǎn)足法規(guī)要求的航行數(shù)據(jù)記錄(VDR或S-VDR功能)。
- 系統(tǒng)健康管理:監(jiān)控各傳感器及子系統(tǒng)狀態(tài),進(jìn)行故障診斷與報(bào)警。
- 對(duì)外輸出:將綜合導(dǎo)航信息(如綜合船位)通過(guò)標(biāo)準(zhǔn)接口提供給其他船載系統(tǒng)(如自動(dòng)舵、航行數(shù)據(jù)記錄儀等)。
三、關(guān)鍵技術(shù)實(shí)現(xiàn)路徑
- 高精度數(shù)據(jù)融合:這是INS的“大腦”。需要針對(duì)船舶運(yùn)動(dòng)模型和傳感器特性,設(shè)計(jì)魯棒性強(qiáng)、實(shí)時(shí)性高的融合算法,尤其在信號(hào)丟失、受干擾等異常情況下保持系統(tǒng)穩(wěn)定性。
- 實(shí)時(shí)數(shù)據(jù)庫(kù)與高效圖形引擎:為應(yīng)對(duì)海量、多源的動(dòng)態(tài)數(shù)據(jù)刷新和復(fù)雜的電子海圖渲染,需要優(yōu)化數(shù)據(jù)結(jié)構(gòu)和圖形繪制算法,確保顯示流暢,無(wú)延遲。
- 模塊化與可擴(kuò)展性設(shè)計(jì):采用面向服務(wù)的架構(gòu)(SOA)或微服務(wù)理念,使雷達(dá)處理、AIS處理、報(bào)警管理等模塊可獨(dú)立開(kāi)發(fā)、測(cè)試與升級(jí),便于集成新技術(shù)與新傳感器。
- 高可靠性與冗余設(shè)計(jì):關(guān)鍵部件(如處理單元、網(wǎng)絡(luò))應(yīng)采用雙機(jī)熱備或冗余配置,軟件需具備良好的容錯(cuò)與恢復(fù)機(jī)制,以滿(mǎn)足航海對(duì)系統(tǒng)可靠性的苛刻要求。
- 符合國(guó)際標(biāo)準(zhǔn):嚴(yán)格遵循IMO、IEC、IHO等相關(guān)國(guó)際標(biāo)準(zhǔn)(如IMO MSC.252(83)對(duì)INS的性能標(biāo)準(zhǔn)),這是系統(tǒng)獲得型式認(rèn)證并投入使用的前提。
四、開(kāi)發(fā)挑戰(zhàn)與展望
INS的開(kāi)發(fā)是復(fù)雜的系統(tǒng)工程,面臨傳感器誤差建模、多源異步數(shù)據(jù)的時(shí)間同步、復(fù)雜場(chǎng)景下的態(tài)勢(shì)理解、人機(jī)功能合理分配等挑戰(zhàn)。隨著人工智能、大數(shù)據(jù)、云計(jì)算技術(shù)的發(fā)展,未來(lái)的INS將更加智能化,具備自學(xué)習(xí)、自適應(yīng)能力,并能通過(guò)船岸協(xié)同獲取更廣闊的態(tài)勢(shì)信息,最終邁向完全自主的智能航行。
本篇作為系列第四十九篇,系統(tǒng)梳理了船舶綜合導(dǎo)航系統(tǒng)的頂層設(shè)計(jì)。從第五十篇開(kāi)始,我們將深入其下的各個(gè)計(jì)算機(jī)軟硬件技術(shù)開(kāi)發(fā)細(xì)節(jié),包括但不限于:多線(xiàn)程數(shù)據(jù)采集框架實(shí)現(xiàn)、基于C++/Python的特定數(shù)據(jù)融合算法編碼、Qt/WPF框架下的高性能海圖渲染、嵌入式系統(tǒng)在導(dǎo)航設(shè)備中的應(yīng)用等,逐步拆解這一復(fù)雜系統(tǒng)的構(gòu)建過(guò)程,敬請(qǐng)期待。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.yanjuji.com.cn/product/61.html
更新時(shí)間:2026-02-24 12:02:12